Mange mener en robot som en maskin som kan kjøre selvstendig. Men hvis du utvide definisjonen av "robot" litt, kan fjernstyrte gjenstander anses å være en robot. Du tror kanskje at å bygge en fjernstyrt robot er tøff, men i virkeligheten er det enkelt hvis du vet hvordan. Denne artikkelen vil forklare hvordan å bygge en fjernstyrt robot.
Trinn
- 1Gjenkjenne hva du skal bygge det første skrittet i å bygge en fjernstyrt robot er å innse at du ikke kommer til å være i stand til å bygge en full størrelse, tobente, humanoid robot som kan gjøre alle dine gjøremål. Eller vil du være å bygge en robot med flere klør som kan nå ut og plukke opp £ 100 vekter. Du må begynne å bygge en robot som vil være i stand til å gå fremover, bakover, til venstre og høyre fra deg styre den trådløst. Men etter at du får det grunnleggende ned og ha denne enkle robot bygget, kan du vanligvis legge til og endre ting på den. Du bør vanligvis gå etter prinsippet om at ingen roboten noensinne ferdig. Det kan alltid endres og gjøres bedre.
- 2Planlegg ut roboten Før bygge roboten, selv før bestilling av deler. Du trenger å designe din robot. For det første robot bør du gå med en enkel design av bare to servo motorer på et flatt stykke plast. Dette designet er veldig enkelt og vanligvis forlater ekstra plass til å legge til ekstra ting etter at den er bygget. Planlegger å bygge noe rundt 15 cm. ved 20 cm. For en robot denne enkle, bør du være i stand til å bare trekke den ut på papir ved hjelp av en linjal. Tegne det samme størrelse på papiret som det skal være i det virkelige liv, siden roboten er så liten. Når du kommer inn i større og mer komplekse roboter, bør du begynne å lære å bruke CAD eller et program som ligner på det, for eksempel Google Sketchup.
- 3Velg deler det er fortsatt ikke tid til å bestille deler. Men du bør velge dem nå og vet hvor du skal kjøpe dem. Prøv å bestille fra så få steder som mulig og du noen ganger kan spare penger på frakt. Du vil trenge et materiale for chassiset, to "Servo" motorer, et batteri, en sender, en sender og en mottaker.
- Velge en servo motor å flytte roboten du må bruke motorer. En motor vil strømmen ett hjul og ett for den andre. På denne måten kan du bruke den enkleste styringen metoden, differensial stasjonen. Dette betyr å gå fremover både motorer spin fremover, å gå bakover begge motorene spinne bakover, og å slå en motor går og en motor holder seg fortsatt. En servomotor er annerledes enn en enkel DC-motor fordi en servomotor er rettet, kan bare slå 180 grader, og kan overføre data tilbake på sin plass. Dette prosjektet skal bruke servo motorer fordi det er enklere, og du trenger ikke å kjøpe en dyr "speed controller" eller en separat girkasse. Etter at du forstår hvordan du kan bygge en fjernstyrt robot, kan det være lurt å lage en ny en (eller modifisere den første) til å bruke DC-motorer, snarere enn servomotorer. Det er fire grunnleggende ting du trenger å bekymre deg for når du kjøper servo motorer. Dette er hastighet, moment, størrelse / vekt, og hvis de er 360 Modifiserbare. Siden servomotorer bare snu 180 grader, vil roboten bare være i stand til å gå litt forover. Hvis motoren er 360 grader modifiserbare, kan du endre den til å snurre kontinuerlig. Pass på at motoren er 360 grader modifiserbare. Størrelse / vekt ikke er veldig viktig i dette prosjektet fordi du vil sannsynligvis ha god plass til overs uansett. Prøv å få noe gjennomsnittlig størrelse. Dreiemoment er motorene styrke. Dette er hva girene brukes til. Hvis det ikke er noen tannhjul og dreiemomentet er lav, er det sannsynligvis ikke vil la roboten til å gå videre fordi den ikke har styrke. Du vil ha et høyt dreiemoment, men jo høyere dreiemoment, vanligvis den lavere hastigheten. For denne roboten, prøv å få en god balanse mellom fart og moment. Du kan alltids kjøpe og legge ved en kraftigere eller raskere servo når du er ferdig bygget. Det anbefales å få HiTec HS-311 servo for første RC robot. Denne servoen har en god balanse mellom fart og moment, er billig, og er en god størrelse for denne roboten. Hitec HS-311 servo kan kjøpes
- Siden servo kan normalt bare spinne 180 grader du må endre den slik at den har kontinuerlig rotasjon. Endre en servo vil gjøre garantien ugyldig, men det må gjøres. For detaljerte instruksjoner om hvordan du endrer en servo go
- Velg en Battery Du trenger å få noe til å drive roboten. Ikke prøv å bruke AC (dvs. plugg den inn i veggen) makt. Du bør bruke DC (dvs. batterier) makt.
- Velg en batteritype * Det er tre hovedtyper av batterier som vi skal velge mellom. Dette er Lithium Polymer (LiPo), NiMH, NiCd, og alkaliske.
- Lipo batterier er de nyeste batterier som du kan få, og er ekstremt lett. Imidlertid, de er farlige, kostbare, og krever en spesiell lader. Bare bruke denne typen batteri hvis du har erfaring i roboter og er villig til å bruke mer penger på roboten.
- NiCd batterier er vanlige oppladbare batterier. Disse brukes i en masse av roboter. Det største problemet med disse batteriene er hvis du lader dem når de ikke er helt døde, vil de ikke vare så lenge på en full lading.
- NiMH-batterier er svært lik NiCad batterier i størrelse, vekt og pris, men har bedre generell ytelse og disse er de batteriene som vanligvis anbefales for en nybegynner prosjekt.
- Alkaliske batterier er de vanlige batterier som ikke er oppladbare. Disse batteriene er vanlige (Du har sannsynligvis noen), billig og lett å få. Men dør de fort og du må kjøpe dem om og om igjen. Ikke bruk disse.
- Velg Batterispesifikasjoner Du må velge en spenning for batteripakken. Den vanligste i roboter er 4.8V og 6.0V. De fleste servoer vil være fint å kjøre på noen av disse. Det er vanligvis anbefales å gå med 6.0V (hvis servoer kan håndtere det, som de fleste kan) fordi det vil tillate deg å ha din servo motor går raskere og har mer makt. Nå må du håndtere kapasiteten på robotens batteripakke. Disse er merket som MaH. Jo høyere du går jo bedre, men dyrere og vanligvis tyngre. For størrelsen på roboten du bygger, er anbefaler det ca 1800 mAh. Hvis du må velge mellom et 1450 mAh batteri eller et 2000 mAh batteri med samme spenning og vekt gå med 2000 mAh. Det vil være dyrere med noen få dollar, men er en rundt bedre batterilevetid å få. Pass på at du får en lader til å lade batteriet med. En 6.0V 2000mAh NiMH batteri kan kjøpes
- Velg en batteritype * Det er tre hovedtyper av batterier som vi skal velge mellom. Dette er Lithium Polymer (LiPo), NiMH, NiCd, og alkaliske.
- Velg en Material For Robot din Roboten trenger et chassis å feste alle elektronikk til. De fleste roboter denne størrelse er laget av plast eller aluminium. For en nybegynner, er det anbefalt å bruke en type plast som kalles HDPE. Denne plasten er lett å jobbe med og billig. Når de bestemmer tykkelsen å få, få ca 1/4 "tykk. Når du bestemmer hvor stor av et ark for å få, bør du sannsynligvis få en ganske stor ark i tilfelle du rotet opp på skjæring. Det er vanligvis anbefales for å få minst dobbelt størrelsen på roboten. Men du sannsynligvis bør få mer. A 1/4 "24" X24 "stykke HDPE kan kjøpes
- Velg en sender / mottaker Dette kommer til å være den dyreste delen av roboten. Det kan også anses som den viktigste, fordi uten det, kan roboten ikke gjøre noe. Det er sterkt anbefalt å kjøpe en god sender / mottaker til å begynne med, fordi det er ting som vil være grensen for hvor mye du kan sette på. En billig sender / mottaker vil flytte roboten fine, men du vil ikke kunne legge noe til det. Dessuten kan senderen brukes til andre roboter som du kan bygge i fremtiden. Så i stedet for å kjøpe en billig en nå og en dyrere en senere, bare kjøpe den bedre nå. Det vil spare deg for penger i det lange løp. Uansett, er det noen frekvenser som du kan bruke. Den vanligste er 27Mhz, 72Mhz, 75Mhz, og 2.4Ghz. 27mhz kan brukes til fly eller biler. Den er mest brukt i billige fjernstyrte leker. 27mhz anbefales ikke for noe annet enn små prosjekter. 72Mhz kan bare brukes til fly. Siden 72Mhz brukes vanligvis i store modellfly, er det ulovlig å bruke i kjøretøyer overflaten. Hvis du bruker 72Mhz, ikke bare er du bryte loven, men du kan forstyrre med en stor, dyr modell fly som flyr i nærheten. Dette kan føre til at det å krasje og kan koste mye penger å reparere, eller enda verre krasjet inn i en person og skade eller drepe dem. 75Mhz er laget for bare overflate bruk, slik at du kan bruke denne. Imidlertid er 2,4 best. Den har mindre interferens enn noen av de andre frekvenser. Det er sterkt anbefalt å bruke ekstra par dollar og få en 2.4Ghz sender og mottaker. Etter at du har bestemt deg for hvilken frekvens du skal bruke, må du bestemme hvor mange "kanaler" du kommer til å få på senderen / mottakeren. Kanaler er ganske mye hvor mange ting du kan kontrollere på roboten. For denne roboten vil du trenge minst to. En kanal vil la roboten gå forover / bakover og man vil tillate det å gå til venstre / høyre. Imidlertid er det anbefalt å få minst tre. Dette er fordi, etter at du har bygget roboten, kan det være lurt å legge en annen ting til det. Hvis du får 4, du vanligvis har to styrespaker. Med en fire kanals sender / mottaker, kan du være i stand til slutt legge en klo. Som sagt før, bør du få den beste senderen / mottakeren budsjettet tillater nå, så du trenger ikke å kjøpe en bedre en senere. Du kan bruke senderen og selv mottakeren igjen på andre roboter du kan bygge. Den Spektrum DX5e 5-kanals 2.4Ghz Radio System Mode 2 og AR500 kan kjøpes sammen
- Velg Wheels Når du velger hjul, de tre viktigste tingene du trenger å bekymre deg om er diameter, trekkraft, og hvis de vil legge til dine motorer lett. Diameter er lengden av hjulet fra den ene side, gjennom midtpunktet, til den andre siden. Jo større diameteren til hjulet er, jo raskere blir det av og jo mer kan stige, men den mindre dreiemoment vil det ha. Hvis du har en mindre hjul, kan det ikke være i stand til å klatre svært lett eller gå veldig fort, men det vil ha mer makt. Traction er hvor godt hjulene feste seg på overflaten. Sørg for at du får hjul med gummi eller skum ring rundt dem slik at de ikke bare skli rundt. De fleste hjul som er laget for å feste til servoer, vil være i stand til å bare skru rett på dem, slik at du ikke trenger å bekymre deg for at så mye. Det er anbefalt å få et hjul et sted mellom 3 og 5 inches i diameter med en gummi ring rundt dem. Du trenger to hjul. Precision disk hjul kan kjøpes
- Velge en servo motor å flytte roboten du må bruke motorer. En motor vil strømmen ett hjul og ett for den andre. På denne måten kan du bruke den enkleste styringen metoden, differensial stasjonen. Dette betyr å gå fremover både motorer spin fremover, å gå bakover begge motorene spinne bakover, og å slå en motor går og en motor holder seg fortsatt. En servomotor er annerledes enn en enkel DC-motor fordi en servomotor er rettet, kan bare slå 180 grader, og kan overføre data tilbake på sin plass. Dette prosjektet skal bruke servo motorer fordi det er enklere, og du trenger ikke å kjøpe en dyr "speed controller" eller en separat girkasse. Etter at du forstår hvordan du kan bygge en fjernstyrt robot, kan det være lurt å lage en ny en (eller modifisere den første) til å bruke DC-motorer, snarere enn servomotorer. Det er fire grunnleggende ting du trenger å bekymre deg for når du kjøper servo motorer. Dette er hastighet, moment, størrelse / vekt, og hvis de er 360 Modifiserbare. Siden servomotorer bare snu 180 grader, vil roboten bare være i stand til å gå litt forover. Hvis motoren er 360 grader modifiserbare, kan du endre den til å snurre kontinuerlig. Pass på at motoren er 360 grader modifiserbare. Størrelse / vekt ikke er veldig viktig i dette prosjektet fordi du vil sannsynligvis ha god plass til overs uansett. Prøv å få noe gjennomsnittlig størrelse. Dreiemoment er motorene styrke. Dette er hva girene brukes til. Hvis det ikke er noen tannhjul og dreiemomentet er lav, er det sannsynligvis ikke vil la roboten til å gå videre fordi den ikke har styrke. Du vil ha et høyt dreiemoment, men jo høyere dreiemoment, vanligvis den lavere hastigheten. For denne roboten, prøv å få en god balanse mellom fart og moment. Du kan alltids kjøpe og legge ved en kraftigere eller raskere servo når du er ferdig bygget. Det anbefales å få HiTec HS-311 servo for første RC robot. Denne servoen har en god balanse mellom fart og moment, er billig, og er en god størrelse for denne roboten. Hitec HS-311 servo kan kjøpes
- 4Bestill produktene nå som du har valgt dine deler, gå videre og bestille dem på nettet. Prøv å bestille dem fra så få steder som mulig, fordi du kan være i stand til å spare penger på frakt på den måten hvis du bestiller alt på samme tid.
- 5Måle og klippe chassis få ut en linjal og en sharpie og måle ut lengden og bredden på chassiset ditt på det materialet du bruker for chassis din. Jeg anbefalte ca 15 cm med ca 20 cm. Nå måle det igjen og sørge for at linjene ikke er bøyd og er hvor lenge du vil de skal være. Husk, måle to ganger, kuttet en gang. Nå kan du klippe. Hvis du bruker HDPE, bør du være i stand til å kutte det på samme måte som du ville kutte et stykke tre som størrelse.
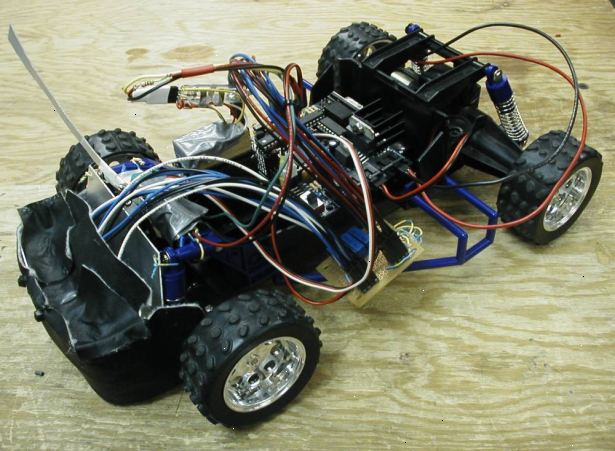
- 6Monter robot nå at du har alle dine materialer og du chassis snitt, du trenger bare å montere alt sammen. Dette kan faktisk være den enkleste trinnet hvis du utviklet roboten godt.
- Monter servomotorer på undersiden av den del av plast nær fronten. De bør være sideveis, slik at akselen / horn (den delen av servo som beveger) ansikt sidene. Sørg for at det er nok plass til å montere hjulene.
- Fest hjulene til servo med skruene som fulgte med servo.
- Feste et stykke borrelås på mottakeren og en annen på batteripakken.
- Sett to stykker av motsatt borrelås på roboten og feste mottakeren og batteripakken til den.
- Du skal nå ha en robot som har to hjul foran og skråner ned mot ryggen. Det er ikke til å være en "tredje hjulet" på denne roboten, i stedet ryggen vil bare gli langs gulvet.
- 7Plugg ledningene i nå som du har roboten montert, du trenger bare å plugge alt i mottakeren. Plugg batteriet inn der det står "batteri" på mottakeren. Pass på at du kobler den på riktig måte. Nå plug servoer i de første to kanaler på mottakeren, der det står "kanal 1" og "kanal 2".
- 8Lad den opp trekk ut batteriet fra mottakeren og plugge den i laderen. Vent til batteriet er fulladet. Dette kan ta en full 24 timer, så vær tålmodig.
- 9Lek med det du skal nå være ferdig. Kom igjen, trykker fremover på senderen. Bygg en hinderløype for det, leke med katten din. Nå som du er ferdig å leke med den. Legg noen ting til det!.
Tips
- Kontroller at sender og mottaker du kjøper er samme frekvens. Sørg også for at mottakeren har det samme eller mer mengde kanaler som sender. Hvis det er flere kanaler på mottakeren enn senderen, vil bare det laveste beløpet av kanaler være brukbare.
- Legg til ting. Hvis du hadde en ekstra kanal på sender / mottaker, kan du legge til en annen servo motor å gjøre noe ekstra. Hvis du har en ekstra kanal, kan du prøve å lage en klo som kan lukkes. Hvis du har to ekstra kanaler, prøve å lage en klo som kan åpne / lukke og flytte til venstre og høyre. Bruk fantasien.
- Du må kanskje kjøpe en adapter som lar deg koble batteriet i laderen.
- Hvis du trykker rett og roboten går igjen, prøve å bytte den inngangen som du plugget servoer inn på mottakeren. dvs. Hvis du har koblet riktig servo til kanal 1 og til venstre inn i kanal 2, slå dem og plugge rett inn i kanal 2 og venstre i kanal 1.
Advarsler
- Nybegynnere bør ikke prøve å bruke vekselstrøm (dvs. koblet til stikkontakten) for noen hjemmelaget prosjekt. Vekselstrøm er ekstremt farlig.
- Ikke bruk frekvens 72mhz med mindre du bygger et fly. Hvis du bruker den på en overflate kjøretøy, ikke bare er det ulovlig, men du kan skade eller drepe noen.
Ting du trenger
- Materiale for Chassis ditt: HDPE er ca 15€ 0,00 for den størrelsen du bør få, og du vil ha mye ekstra.
- To Servo Motors: Hitec HS-311 servoer er ca 10€ 0,00 hver.
- En Mottaker: Mottakeren av senderen som er montert inne i helikopteret
- A Batteri: En 6.0V 2000mAh NiMH batteri er ca 20€ 0,00.
- En batterilader: En batterilader er ca 15€ 0,00.
- 2 Hjul: Precision Disk Hjul 5 inches i diameter er ca 10€ 0,00 hver.
- Sticky borrelås